The Laplace operator was first applied to the study of celestial mechanics, or the motion of objects in outer space, by Pierre-Simon de Laplace, and as such has been named after him.
The Laplace operator has since been used to describe many different phenomena, from electric potentials, to the diffusion equation for heat and fluid flow, and quantum mechanics. It has also been recasted to the discrete space, where it has been used in applications related to image processing and spectral clustering.
In this tutorial, you will discover a gentle introduction to the Laplacian.
After completing this tutorial, you will know:
- The definition of the Laplace operator and how it relates to divergence.
- How the Laplace operator relates to the Hessian.
- How the continuous Laplace operator has been recasted to discrete-space, and applied to image processing and spectral clustering.
Let’s get started.

A Gentle Introduction to the Laplacian
Photo by Aziz Acharki, some rights reserved.
Tutorial Overview
This tutorial is divided into two parts; they are:
- The Laplacian
- The Concept of Divergence
- The Continuous Laplacian
- The Discrete Laplacian
Prerequisites
For this tutorial, we assume that you already know what are:
You can review these concepts by clicking on the links given above.
The Laplacian
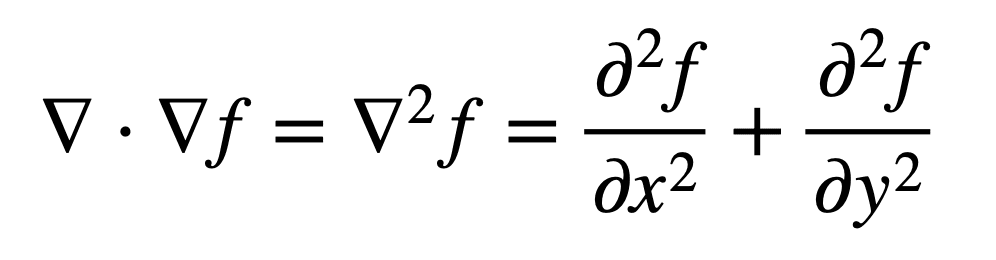
The Laplace operator (or Laplacian, as it is often called) is the divergence of the gradient of a function.
In order to comprehend the previous statement better, it is best that we start by understanding the concept of divergence.
The Concept of Divergence
Divergence is a vector operator that operates on a vector field. The latter can be thought of as representing a flow of a liquid or gas, where each vector in the vector field represents a velocity vector of the moving fluid.
Roughly speaking, divergence measures the tendency of the fluid to collect or disperse at a point …
– Page 432, Single and Multivariable Calculus, 2020.
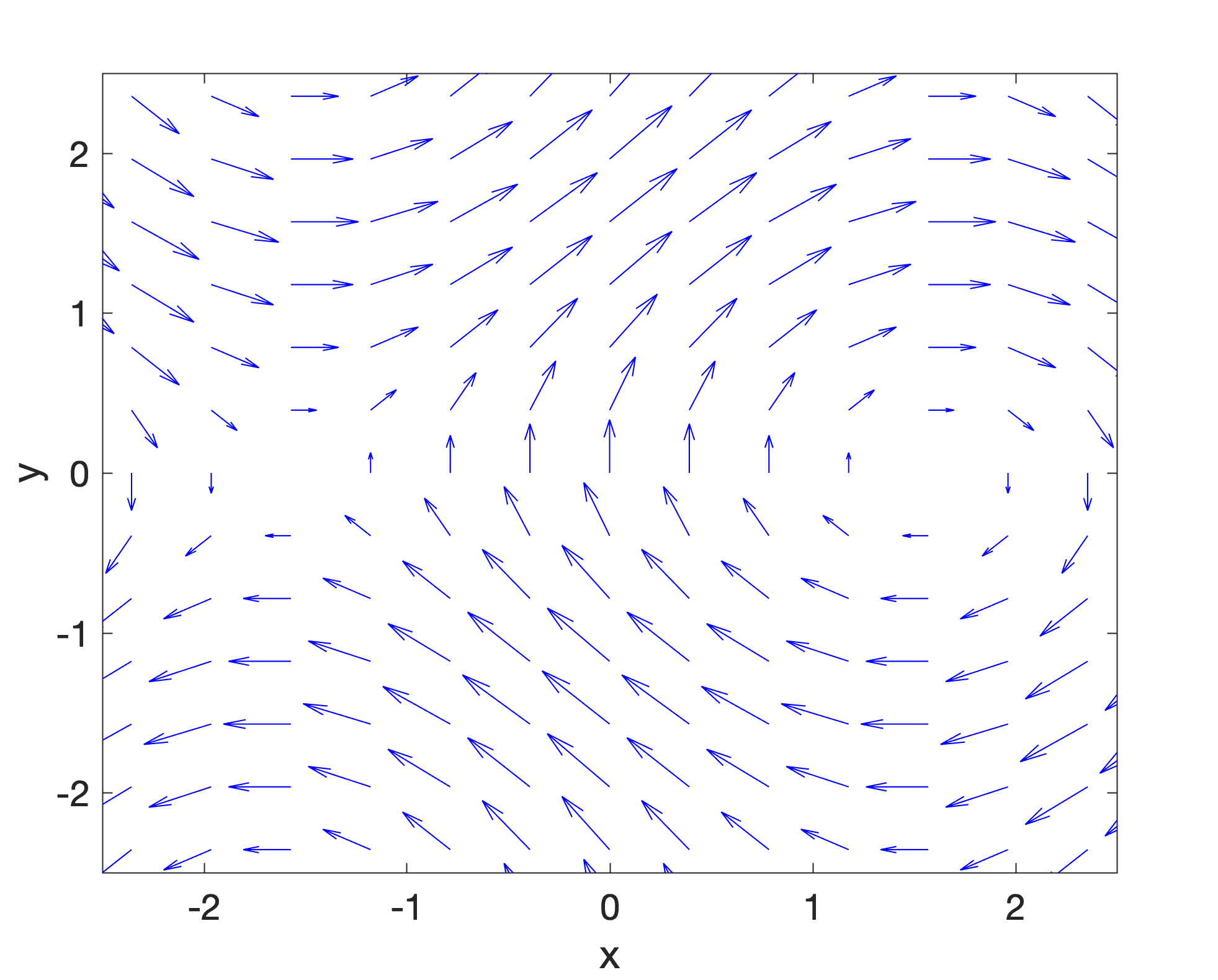
Part of the Vector Field of (sin y, cos x)
Using the nabla (or del) operator, ∇, the divergence is denoted by ∇ . and produces a scalar value when applied to a vector field, measuring the quantity of fluid at each point. In Cartesian coordinates, the divergence of a vector field, F = ⟨f, g, h⟩, is given by:

Although the divergence computation involves the application of the divergence operator (rather than a multiplication operation), the dot in its notation is reminiscent of the dot product, which involves the multiplication of the components of two equal-length sequences (in this case, ∇ and F) and the summation of the resulting terms.
The Continuous Laplacian
Let’s return back to the definition of the Laplacian.
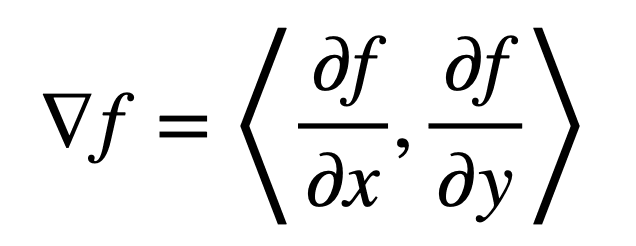
Recall that the gradient of a two-dimensional function, f, is given by:
Then, the Laplacian (that is, the divergence of the gradient) of f can be defined by the sum of unmixed second partial derivatives:
It can, equivalently, be considered as the trace (tr) of the function’s Hessian, H(f). The trace defines the sum of the elements on the main diagonal of a square n×n matrix, which in this case is the Hessian, and also the sum of its eigenvalues. Recall that the Hessian matrix contains the own (or unmixed) second partial derivatives on the diagonal:
![]()
An important property of the trace of a matrix is its invariance to a change of basis. We have already defined the Laplacian in Cartesian coordinates. In polar coordinates, we would define it as follows:
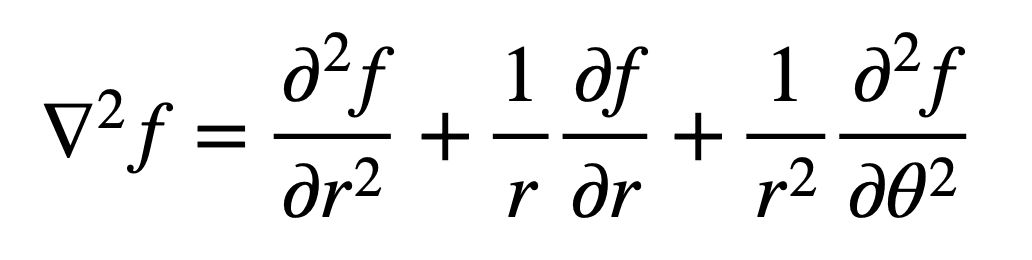
The invariance of the trace to a change of basis means that the Laplacian can be defined in different coordinate spaces, but it would give the same value at some point (x, y) in the Cartesian coordinate space, and at the same point (r, θ) in the polar coordinate space.
Recall that we had also mentioned that the second derivative can provide us with information regarding the curvature of a function. Hence, intuitively, we can consider the Laplacian to also provide us with information regarding the local curvature of a function, through this summation of second derivatives.
The continuous Laplace operator has been used to describe many physical phenomena, such as electric potentials, and the diffusion equation for heat flow.
Want to Get Started With Calculus for Machine Learning?
Take my free 7-day email crash course now (with sample code).
Click to sign-up and also get a free PDF Ebook version of the course.
The Discrete Laplacian
Analogous to the continuous Laplace operator, is the discrete one, so formulated in order to be applied to a discrete grid of, say, pixel values in an image, or to a graph.
Let’s have a look at how the Laplace operator can be recasted for both applications.
In image processing, the Laplace operator is realized in the form of a digital filter that, when applied to an image, can be used for edge detection. In a sense, we can consider the Laplacian operator used in image processing to, also, provide us with information regarding the manner in which the function curves (or bends) at some particular point, (x, y).
In this case, the discrete Laplacian operator (or filter) is constructed by combining two, one-dimensional second derivative filters, into a single two-dimensional one:
![]()
In machine learning, the information provided by the discrete Laplace operator as derived from a graph can be used for the purpose of data clustering.
Consider a graph, G = (V, E), having a finite number of V vertices and E edges. Its Laplacian matrix, L, can be defined in terms of the degree matrix, D, containing information about the connectivity of each vertex, and the adjacency matrix, A, which indicates pairs of vertices that are adjacent in the graph:
L = D – A
Spectral clustering can be carried out by applying some standard clustering method (such as k-means) on the eigenvectors of the Laplacian matrix, hence partitioning the graph nodes (or the data points) into subsets.
One issue that can arise in doing so relates to a problem of scalability with large datasets, where the eigen-decomposition (or the extraction of the eigenvectors) of the Laplacian matrix may be prohibitive. The use of deep learning has been proposed to address this problem, where a deep neural network is trained such that its outputs approximate the eigenvectors of the graph Laplacian. The neural network, in this case, is trained using a constrained optimization approach, to enforce the orthogonality of the network outputs.
Further Reading
This section provides more resources on the topic if you are looking to go deeper.
Books
Articles
- Laplace operator, Wikipedia.
- Divergence, Wikipedia.
- Discrete Laplace operator, Wikipedia.
- Laplacian matrix, Wikipedia.
- Spectral clustering, Wikipedia.
Papers
Summary
In this tutorial, you discovered a gentle introduction to the Laplacian.
Specifically, you learned:
- The definition of the Laplace operator and how it relates to divergence.
- How the Laplace operator relates to the Hessian.
- How the continuous Laplace operator has been recasted to discrete-space, and applied to image processing and spectral clustering.
Do you have any questions?
Ask your questions in the comments below and I will do my best to answer.
Get a Handle on Calculus for Machine Learning!

Feel Smarter with Calculus Concepts
...by getting a better sense on the calculus symbols and terms
Discover how in my new Ebook:
Calculus for Machine Learning
It provides self-study tutorials with full working code on:
differntiation, gradient, Lagrangian mutiplier approach, Jacobian matrix,
and much more...





")
Great math explanation!
Thank you!
At the end or as a summary I think we are talking about math derivatives (operator) …
that is to say, how things change respect other things (fractions) …and that change analysis provide rich information about other physical features or patterns (in image analysis)
Thank you for your comment!
The vector field cannot be (cos x, sin y). At (0,0) you have a vertical arrow. Perhaps you flipped the coordinates.
Thank you for the feedback Alfredo!
The plot is (sin(y), cos(x))
I am in my 2nd year in Bachelor of Chemical Engineering at University of New Brunswick. I was looking for a quick sensible review about Laplacian for the Heat Transport Equations, I found some insight from here, not bad!
Thank you for your feedback Zulfiqar! While our content is not academically based, we do hope that it can serve as a great starting point.
Roughly speaking, divergence measures the tendency of the fluid to collect or disperse at a point …
– Page 432, Single and Multivariable Calculus, 2020.
This is actually in page 433, in chapter 16.5 Divergence and Curl
Thank you KP! We appreciate it!