Decision Trees are an important type of algorithm for predictive modeling machine learning.
The classical decision tree algorithms have been around for decades and modern variations like random forest are among the most powerful techniques available.
In this post you will discover the humble decision tree algorithm known by it’s more modern name CART which stands for Classification And Regression Trees. After reading this post, you will know:
The many names used to describe the CART algorithm for machine learning.
The representation used by learned CART models that is actually stored on disk.
How a CART model can be learned from training data.
How a learned CART model can be used to make predictions on unseen data.
Additional resources that you can use to learn more about CART and related algorithms.
If you have taken an algorithms and data structures course, it might be hard to hold you back from implementing this simple and powerful algorithm. And from there, you’re a small step away from your own implementation of Random Forests.
Kick-start your project with my new book Master Machine Learning Algorithms, including step-by-step tutorials and the Excel Spreadsheet files for all examples.
Let’s get started.
Update Aug 2017: Fixed a typo that indicated that Gini is the count of instances for a class, should have been the proportion of instances. Also updated to show Gini weighting for evaluating the split in addition to calculating purity for child nodes.
Classification And Regression Trees for Machine Learning Photo by Wonderlane, some rights reserved.
Decision Trees
Classification and Regression Trees or CART for short is a term introduced by Leo Breiman to refer to Decision Tree algorithms that can be used for classification or regression predictive modeling problems.
Classically, this algorithm is referred to as “decision trees”, but on some platforms like R they are referred to by the more modern term CART.
The CART algorithm provides a foundation for important algorithms like bagged decision trees, random forest and boosted decision trees.
Get your FREE Algorithms Mind Map
Sample of the handy machine learning algorithms mind map.
I've created a handy mind map of 60+ algorithms organized by type.
Download it, print it and use it.
Also get exclusive access to the machine learning algorithms email mini-course.
CART Model Representation
The representation for the CART model is a binary tree.
This is your binary tree from algorithms and data structures, nothing too fancy. Each root node represents a single input variable (x) and a split point on that variable (assuming the variable is numeric).
The leaf nodes of the tree contain an output variable (y) which is used to make a prediction.
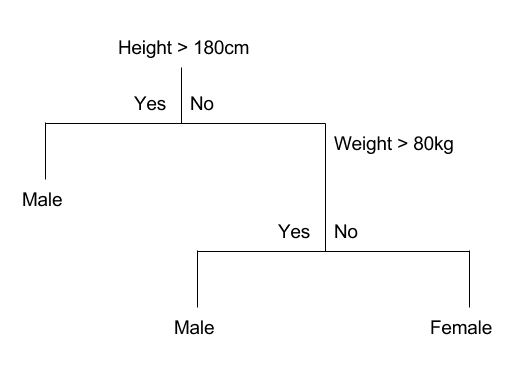
Given a dataset with two inputs (x) of height in centimeters and weight in kilograms the output of sex as male or female, below is a crude example of a binary decision tree (completely fictitious for demonstration purposes only).
Example Decision Tree
The tree can be stored to file as a graph or a set of rules. For example, below is the above decision tree as a set of rules.
1
2
3
4
If Height > 180 cm Then Male
If Height <= 180 cm AND Weight > 80 kg Then Male
If Height <= 180 cm AND Weight <= 80 kg Then Female
Make Predictions With CART Models
With the binary tree representation of the CART model described above, making predictions is relatively straightforward.
Given a new input, the tree is traversed by evaluating the specific input started at the root node of the tree.
A learned binary tree is actually a partitioning of the input space. You can think of each input variable as a dimension on a p-dimensional space. The decision tree split this up into rectangles (when p=2 input variables) or some kind of hyper-rectangles with more inputs.
New data is filtered through the tree and lands in one of the rectangles and the output value for that rectangle is the prediction made by the model. This gives you some feeling for the type of decisions that a CART model is capable of making, e.g. boxy decision boundaries.
For example, given the input of [height = 160 cm, weight = 65 kg], we would traverse the above tree as follows:
1
2
3
Height > 180 cm: No
Weight > 80 kg: No
Therefore: Female
Learn a CART Model From Data
Creating a CART model involves selecting input variables and split points on those variables until a suitable tree is constructed.
The selection of which input variable to use and the specific split or cut-point is chosen using a greedy algorithm to minimize a cost function. Tree construction ends using a predefined stopping criterion, such as a minimum number of training instances assigned to each leaf node of the tree.
Greedy Splitting
Creating a binary decision tree is actually a process of dividing up the input space. A greedy approach is used to divide the space called recursive binary splitting.
This is a numerical procedure where all the values are lined up and different split points are tried and tested using a cost function. The split with the best cost (lowest cost because we minimize cost) is selected.
All input variables and all possible split points are evaluated and chosen in a greedy manner (e.g. the very best split point is chosen each time).
For regression predictive modeling problems the cost function that is minimized to choose split points is the sum squared error across all training samples that fall within the rectangle:
sum(y – prediction)^2
Where y is the output for the training sample and prediction is the predicted output for the rectangle.
For classification the Gini index function is used which provides an indication of how “pure” the leaf nodes are (how mixed the training data assigned to each node is).
G = sum(pk * (1 – pk))
Where G is the Gini index over all classes, pk are the proportion of training instances with class k in the rectangle of interest. A node that has all classes of the same type (perfect class purity) will have G=0, where as a G that has a 50-50 split of classes for a binary classification problem (worst purity) will have a G=0.5.
For a binary classification problem, this can be re-written as:
G = 2 * p1 * p2
or
G = 1 – (p1^2 + p2^2)
The Gini index calculation for each node is weighted by the total number of instances in the parent node. The Gini score for a chosen split point in a binary classification problem is therefore calculated as follows:
Where G is the Gini index for the split point, g1_1 is the proportion of instances in group 1 for class 1, g1_2 for class 2, g2_1 for group 2 and class 1, g2_2 group 2 class 2, ng1 and ng2 are the total number of instances in group 1 and 2 and n are the total number of instances we are trying to group from the parent node.
Stopping Criterion
The recursive binary splitting procedure described above needs to know when to stop splitting as it works its way down the tree with the training data.
The most common stopping procedure is to use a minimum count on the number of training instances assigned to each leaf node. If the count is less than some minimum then the split is not accepted and the node is taken as a final leaf node.
The count of training members is tuned to the dataset, e.g. 5 or 10. It defines how specific to the training data the tree will be. Too specific (e.g. a count of 1) and the tree will overfit the training data and likely have poor performance on the test set.
Pruning The Tree
The stopping criterion is important as it strongly influences the performance of your tree. You can use pruning after learning your tree to further lift performance.
The complexity of a decision tree is defined as the number of splits in the tree. Simpler trees are preferred. They are easy to understand (you can print them out and show them to subject matter experts), and they are less likely to overfit your data.
The fastest and simplest pruning method is to work through each leaf node in the tree and evaluate the effect of removing it using a hold-out test set. Leaf nodes are removed only if it results in a drop in the overall cost function on the entire test set. You stop removing nodes when no further improvements can be made.
More sophisticated pruning methods can be used such as cost complexity pruning (also called weakest link pruning) where a learning parameter (alpha) is used to weigh whether nodes can be removed based on the size of the sub-tree.
Recursive Binary Splitting for Decision Trees Photo by Paul L Dineen, some rights reserved.
Data Preparation for CART
CART does not require any special data preparation other than a good representation of the problem.
Further Reading
This section lists some resources that you can refer to if you are looking to go deeper with CART.
Hi, Jason! How can I avoid over-fitting problem when using a CART model. When I used a CART tree to classify different fault types of data, the cp is the only parameter for obtained a optimal CART model. But the tree structure of the training model is obviously over-fitted from my domain knowledge. So what should I do to avoid overfitting?
How is the variable selection of input variables done while implementing the greedy algorithm . For calculating the minimum cost function you need the predicted values , but how does the algorithm select the variable from input variable for the first split.
Sir, i have following questions. It would be of great help if you could answer them for me.
1)Is CART the modern name for decision tree approach in Data Science field.
2)What are the scenarios where CART can be used.
3)what are the advantages of using CART over other techniques of predicition.
1. Yes, CART or classification and regression trees is the modern name for the standard decision tree.
2. Very widely on classification and regression predictive modeling problems. Try it and see.
3. Fast to train, easy to understand result and generally quite effective.
I am wondering why my CART produced only one nodes when I exclude one variable for example ID? I tried to change the cp but it is still giving the same results. Can you assist me on this?
I am new into machine learning. For an intership it is asked if it is possible to make a classification method. The input variables are a small number of words(varying from 1-6), output variables are 0 or 1. Is it possible to apply CART for this problem? I am having difficulties finding on what kind of problems different algorithms are used, do you have tips?
Hi Jason,
I didn’t understand how the algorithm selects the input variables for the splits. In your example,
why was the height split before weight? Thank you.
Hi Jason,
I’am working on a highly unbalanced data, I have 4 classes, 98,4% of the data is class 0. When i try to prune the tree using rpart package. Using X-Var relative error to decide on the number of nodes gives exactly one node. Is it possible to change X-Var relative error to another one (in the this package or in another one) that takes more on consideration the other classes ?
I haven’t seen many examples of decision trees used for regression, just for classification. Have any favorite examples you know of, or will you do a post on that? It would be interesting to talk about the difference between OLS and other linear regression methods methinks.
Could you help me with this question, i’m new on machine learning. Thanks
You are a junior data scientist within Standard Bank Corporate and Investment Banking and have been tasked to explain to the Investment Bankers how data science algorithms work and in what ways they can assist them in running their day to day activities.
The investment bankers receive a lot of information on a daily basis from internal and external sources such as journals, newsfeeds, macro-economic data, company financials to name but a few. They use this information to assess where the next big deals are likely to emanate from and prioritise those opportunities which they perceive to have the highest chance of materialisation. They also take into account factors such as:
I. Value of the deal
II. Potential commission
III. Presence of Standard Bank in country where deal is taking place
IV. Type of deal (merger, acquisition, equity deal etc.)
V. Credit ratings of companies involved in deal
VI. Geographical region
VII. Industrial Sector (e.g. Agriculture, Tourism, Financial Service etc.)
Please note that deals occur few and far between.
You then decide to showcase to them the power of Decision trees and how they can be used to evaluate all potential deals. Using the information above:
1. Explain the steps in making a decision tree and how they can be applied to this business challenge.
# removing the id, Zip and experience as experience
# is correlated to age
names(univ2)
univ2Num <- subset(univ2, select=c(2,3,4,8,9))
head(univ2Num)
cor(univ2Num)
# Converting the categorical variables into factors
# Discretizing age and income into categorial variables
library(infotheo)
#Discretizing the variable 'age'
age <- discretize(univ2$age, disc="equalfreq",
nbins=10)
class(age)
head(age)
age=as.factor(age$X)
#Discretizing the variable 'inc'
inc=discretize(univ2$inc, disc="equalfreq",
nbins=10)
head(inc)
inc=as.factor(inc$X)
#Discretizing the variable 'age'
ccavg=discretize(univ2$ccavg, disc="equalwidth",
nbins=10)
ccavg=as.factor(ccavg$X)
#Discretizing the variable 'age'
mortgage=discretize(univ2$mortgage, disc="equalwidth",
nbins=5)
mortgage=as.factor(mortgage$X)
# *** Removing the numerical variables from the original
# *** data and adding the categorical forms of them
head(univ2)
univ2 <- subset(univ2, select= -c(age,inc,ccavg,mortgage))
head(univ2)
univ2 <- cbind(age,inc,ccavg,mortgage,univ2)
head(univ2,20)
dim(univ2)
str(univ2)
summary(univ2)
# Let us divide the data into training, testing
# and evaluation data sets
rows=seq(1,5000,1)
set.seed(123)
trainRows=sample(rows,3000)
set.seed(123)
remainingRows=rows[-(trainRows)]
testRows=sample(remainingRows, 1000)
evalRows=rows[-c(trainRows,testRows)]
#Use the rpart function to build a classification tree model
dtCart <- rpart(loan ~ ., data=train, method="class", cp = .001)
#Type churn.rp to retrieve the node detail of the
#classification tree
dtCart
#Use the printcp function to examine the complexity parameter
printcp(dtCart)
#use the plotcp function to plot the cost complexity parameters
plotcp(dtCart)
#plot function and the text function to plot the classification tree
plot(dtCart,main="Classification Tree for loan Class",
margin=.1, uniform=TRUE)
text(dtCart, use.n=T)
## steps to validate the prediction performance of a classification tree
————————————————————————
predict(dtCart, newdata=train, type="class")
a <- table(train$loan, predict(dtCart,
newdata=train, type="class"))
dtrain <- (a[2,2])/(a[2,1]+a[2,2])*100
a <-table(test$loan, predict(dtCart,
newdata=test, type="class"))
dtest <- (a[2,2])/(a[2,1]+a[2,2])*100
a <- table(eval$loan, predict(dtCart,
newdata=eval, type="class"))
deval <- (a[2,2])/(a[2,1]+a[2,2])*100
cat("Recall in Training", dtrain, '\n',
"Recall in Testing", dtest, '\n',
"Recall in Evaluation", deval)
#### Pruning a tree
——————–
#Finding the minimum cross-validation error of the
#classification tree model
min(dtCart$cptable[,"xerror"])
#Locate the record with the minimum cross-validation errors
which.min(dtCart$cptable[,"xerror"])
#Get the cost complexity parameter of the record with
#the minimum cross-validation errors
dtCart.cp <- dtCart$cptable[5,"CP"]
dtCart.cp
#Prune the tree by setting the cp parameter to the CP value
#of the record with minimum cross-validation errors:
prune.tree <- prune(dtCart, cp= dtCart.cp)
prune.tree
#Visualize the classification tree by using the plot and
#text function
plot(prune.tree, margin= 0.01)
text(prune.tree, all=FALSE , use.n=TRUE)
## steps to validate the prediction performance of a classification tree
————————————————————————
a <- table(train$loan, predict(prune.tree,
newdata=train, type="class"))
dtrain <- (a[2,2])/(a[2,1]+a[2,2])*100
a <-table(test$loan, predict(prune.tree,
newdata=test, type="class"))
dtest <- (a[2,2])/(a[2,1]+a[2,2])*100
a <- table(eval$loan, predict(prune.tree,
newdata=eval, type="class"))
deval <- (a[2,2])/(a[2,1]+a[2,2])*100
cat("Recall in Training", dtrain, '\n',
"Recall in Testing", dtest, '\n',
"Recall in Evaluation", deval)
#———————————————————
# Decision tree using Conditional Inference
library(party)
ctree.model= ctree(loan ~ ., data = train)
plot(ctree.model)
At this link(www.saedsayad.com/decision_tree.htm), Saed wrote at the bottom of the page some issues about decision trees. So my question is,
1. What if we dealt with missing values in the dataset prior to fit the model to our dataset, how decision trees will work as Saed mention that decision trees only work with missing values?
2. What are continuous attributes as Saed allude that decision trees algorithm works with continuous attributes(binning)?
Good morning Sir, I want to ask you about CART algorithm for predicting continuous number… I have read another reference and it tells that to predict continuous number, we should replace the gini index using standard deviation reduction. is it true??
thanks Sir
Thanks for the response Sir. According to that, I want to ask your opinion about standard deviation reduction can be used for regression tree. If you don’t mind, I hope you can explain to me, Sir. Thanks Sir
He used the Standard Deviation Reduction to replacing Information Gain. So, I still confuse to build the tree using such the formula. Maybe, you can help me, Sir.. 🙂
In regression we are able to get an equation like this y=0.91+1.44X1+1.07X2 in the final, where we could replace x1 and x2 with any number of values, is it possible to obtain a similar formula at the ednd using CART ?
Can CART be used for Multi class classification without one versus all approach? What are the decision tree algorithms that support multi class classification? I understand that CHIAD trees can have more than 2 splits at each node. Does it mean it can handle multi class classification
Hi, I am PhD Student, i have one course of Data Science. i have some confusion in CART. I want some clear examples links. i searched a lot. but not found proper article or examples that make my concept clear.
i need one clear solved example. could you please suggest some link.
My question is: when i have a data set, and want to calculate Gini index or CART for that. so my understanding is to compute Gini for each instance of attribute individually . After that calculate the weighted sum of all indexes . Among that will further decide the root node…
Hi am new to machine learning but would like to enhance evaluation of class performance using CART, is it possible?
For example what would be the input variables
I am new in Machine learning. I wish to confirm my understanding. For every node all features will be tested with all possible split point so as to minimize the cost function?. I mean before assigning any node a particular feature with a split point. Every feature will be tested with all possible split point and whosesoever will produce minimum cost function that will be picked up?








how about C 4.5 (which is called J48 in weka) and C 5.0, please make tutorial for that sir, i need it
I have one sentence amd its polarity -ve or +ve, I want use CART for accuricy.But I am not able to understand how?
is it possible to infuse CART in GA?
No idea Joe.
Sir, i am wanting to compare CART and GA.
Hi Mynose, they are very different. CART is a function approximation method and a GA is a function optimization method.
I guess you could use the GA to optimize a set of rules or a tree and compare that to the CART. Sounds fun.
Hi, Jason! How can I avoid over-fitting problem when using a CART model. When I used a CART tree to classify different fault types of data, the cp is the only parameter for obtained a optimal CART model. But the tree structure of the training model is obviously over-fitted from my domain knowledge. So what should I do to avoid overfitting?
Hi Lee, great question.
The main approach is to constrain the depth of the tree.
You can do this when growing the tree, but the preferred method is to prune a deep tree after it is constructed.
Hello Sir,
How is the variable selection of input variables done while implementing the greedy algorithm . For calculating the minimum cost function you need the predicted values , but how does the algorithm select the variable from input variable for the first split.
Regards,
Rohit
Hi Rohit, we have the predicted values at the time we calculate splits – it’s all in the training data.
Splits are fixed after training, then we just use them to make predictions on new data.
Sir, i have following questions. It would be of great help if you could answer them for me.
1)Is CART the modern name for decision tree approach in Data Science field.
2)What are the scenarios where CART can be used.
3)what are the advantages of using CART over other techniques of predicition.
Hi madhav,
1. Yes, CART or classification and regression trees is the modern name for the standard decision tree.
2. Very widely on classification and regression predictive modeling problems. Try it and see.
3. Fast to train, easy to understand result and generally quite effective.
Hi Jason
I am wondering why my CART produced only one nodes when I exclude one variable for example ID? I tried to change the cp but it is still giving the same results. Can you assist me on this?
Is CART algorithm appropriate for decision making projects?
That depends if the decision can be framed as a classification or regression type problem.
Hi Jason,
I am new into machine learning. For an intership it is asked if it is possible to make a classification method. The input variables are a small number of words(varying from 1-6), output variables are 0 or 1. Is it possible to apply CART for this problem? I am having difficulties finding on what kind of problems different algorithms are used, do you have tips?
I would recommend that you follow this process:
https://machinelearningmastery.com/start-here/#process
Hi Jason,
I would like to know what parameters to change in CART, CHAID and QUEST decision tree algorithms for effective modeling.
Sorry I do not have this information.
Hi Jason,
I didn’t understand how the algorithm selects the input variables for the splits. In your example,
why was the height split before weight? Thank you.
It was just an example.
Hi Jason,
I’am working on a highly unbalanced data, I have 4 classes, 98,4% of the data is class 0. When i try to prune the tree using rpart package. Using X-Var relative error to decide on the number of nodes gives exactly one node. Is it possible to change X-Var relative error to another one (in the this package or in another one) that takes more on consideration the other classes ?
Thank you !!
Ouch
Sorry I am not familiar with that package.
Hi Jason,
I haven’t seen many examples of decision trees used for regression, just for classification. Have any favorite examples you know of, or will you do a post on that? It would be interesting to talk about the difference between OLS and other linear regression methods methinks.
Thanks!
Here are some examples:
https://machinelearningmastery.com/non-linear-regression-in-r-with-decision-trees/
Use the search feature on the blog.
Hi,
just a little remark about the Gini function – I think there is a typo:
G = sum(pk * (1 – pk))
-> G = sum( pk/p * (1 – pk/p) ), where p is the total number of instances in the rectangle.
As we seem to be looking at the relative portions of instances per class.
Thanks Pia, I’ll investigate.
Yes, it’s a typo. Fixed. Thank you!
Hi! Jason Brownlee
Could you help me with this question, i’m new on machine learning. Thanks
You are a junior data scientist within Standard Bank Corporate and Investment Banking and have been tasked to explain to the Investment Bankers how data science algorithms work and in what ways they can assist them in running their day to day activities.
The investment bankers receive a lot of information on a daily basis from internal and external sources such as journals, newsfeeds, macro-economic data, company financials to name but a few. They use this information to assess where the next big deals are likely to emanate from and prioritise those opportunities which they perceive to have the highest chance of materialisation. They also take into account factors such as:
I. Value of the deal
II. Potential commission
III. Presence of Standard Bank in country where deal is taking place
IV. Type of deal (merger, acquisition, equity deal etc.)
V. Credit ratings of companies involved in deal
VI. Geographical region
VII. Industrial Sector (e.g. Agriculture, Tourism, Financial Service etc.)
Please note that deals occur few and far between.
You then decide to showcase to them the power of Decision trees and how they can be used to evaluate all potential deals. Using the information above:
1. Explain the steps in making a decision tree and how they can be applied to this business challenge.
This looks like homework, I would recommend getting help from your teachers.
#rm(list=ls(all=TRUE))
setwd(“C:\\Users\\hp\\Desktop\\R”)
version
#Reading from a CSV file
univ=read.table(‘dataDemographics.csv’,
header=T,sep=’,’,
col.names=c(“ID”, “age”, “exp”, “inc”,
“zip”, “family”,
“edu”, “mortgage”))
dim(univ)
head(univ)
str(univ)
names(univ)
sum(is.na(univ))
sum(is.na(univ[[2]])) #see missig values in col 2
sapply(univ, function(x) sum(is.na(x)))
row.names.data.frame(is.na(univ))
# Reading Second Table
loanCalls <- read.table("dataLoanCalls.csv", header=T, sep=",",
col.names=c("ID", "infoReq", "loan"),
dec=".", na.strings="NA")
head(loanCalls)
dim(loanCalls)
sum(is.na(loanCalls))
sapply(loanCalls, function(x) sum(is.na(x)))
# Reading third Table
cc <- read.table("dataCC.csv", header=T, sep=",",
col.names=c("ID", "Month", "Monthly"),
dec=".", na.strings="NA")
head(cc)
dim(cc)
sum(is.na(cc))
sapply(cc, function(x)sum(is.na(x)))
#We have the monthly credit card spending over 12 months.
#We need to compute monthly spendings
tapply
head(cc)
summary(cc)
str(cc)
cc$ID <- as.factor(cc$ID)
cc$Month <- as.factor(cc$Month)
sapply(cc,function(x) length(unique(x)))
summary(cc)
# function to cal. mean
meanNA <- function(x){
a <-mean(x, na.rm=TRUE)
return(a)
}
ccAvg <- data.frame(seq(1,5000),
tapply(cc$Monthly, cc$ID, meanNA))
ccAvg
head(ccAvg)
dim(ccAvg)
names(ccAvg)
colnames(ccAvg) <- c("ID", "ccavg")
str(ccAvg)
ccAvg$ID <- as.factor(ccAvg$ID)
summary(ccAvg)
str(ccAvg)
rm(cc)
# Reading fourth table
otherAccts <- read.table("dataOtherAccts.csv", header=T, sep=",",
col.names=c("ID", "Var", "Val"),
dec=".", na.strings="NA")
dim(otherAccts)
head(otherAccts)
summary(otherAccts)
otherAccts$ID <- as.factor(otherAccts$ID)
otherAccts$Val <- as.factor(otherAccts$Val)
summary(otherAccts)
str(otherAccts)
# to transpose
library(reshape)
otherAcctsT=data.frame(cast(otherAccts,
ID~Var,value="Val"))
head(otherAcctsT)
dim(otherAcctsT)
#Merging the tables
univComp <- merge(univ,ccAvg,
by.x="ID",by.y="ID",
all=TRUE) #Outer join
univComp <- merge(univComp, otherAcctsT,
by.x="ID", by.y="ID",
all=TRUE)
univComp <- merge(univComp, loanCalls,
by.x="ID", by.y="ID",
all=TRUE)
dim(univComp)
head(univComp)
str(univComp)
summary(univComp)
names(univComp)
sum(is.na(univComp))
#Dealing with missing values
#install.packages("VIM")
library(VIM)
matrixplot(univComp)
#Filling up missing values with KNNimputation
library(DMwR)
univ2 <- knnImputation(univComp,
k = 10, meth = "median")
sum(is.na(univ2))
summary(univ2)
head(univ2,10)
univ2$family <- ceiling(univ2$family)
univ2$edu <- ceiling(univ2$edu)
head(univ2,15)
str(univ2)
names(univ2)
# converting ID, Family, Edu, loan into factor
attach(univ2)
univ2$ID <- as.factor(ID)
univ2$family <- as.factor(family)
univ2$edu <- as.factor(edu)
univ2$loan <- as.factor(loan)
str(univ2)
summary(univ2)
sapply(univ2, function(x) length(unique(x)))
# removing the id, Zip and experience as experience
# is correlated to age
names(univ2)
univ2Num <- subset(univ2, select=c(2,3,4,8,9))
head(univ2Num)
cor(univ2Num)
names(univ2)
univ2 <- univ2[,-c(1,3,5)]
str(univ2)
summary(univ2)
# Converting the categorical variables into factors
# Discretizing age and income into categorial variables
library(infotheo)
#Discretizing the variable 'age'
age <- discretize(univ2$age, disc="equalfreq",
nbins=10)
class(age)
head(age)
age=as.factor(age$X)
#Discretizing the variable 'inc'
inc=discretize(univ2$inc, disc="equalfreq",
nbins=10)
head(inc)
inc=as.factor(inc$X)
#Discretizing the variable 'age'
ccavg=discretize(univ2$ccavg, disc="equalwidth",
nbins=10)
ccavg=as.factor(ccavg$X)
#Discretizing the variable 'age'
mortgage=discretize(univ2$mortgage, disc="equalwidth",
nbins=5)
mortgage=as.factor(mortgage$X)
# *** Removing the numerical variables from the original
# *** data and adding the categorical forms of them
head(univ2)
univ2 <- subset(univ2, select= -c(age,inc,ccavg,mortgage))
head(univ2)
univ2 <- cbind(age,inc,ccavg,mortgage,univ2)
head(univ2,20)
dim(univ2)
str(univ2)
summary(univ2)
# Let us divide the data into training, testing
# and evaluation data sets
rows=seq(1,5000,1)
set.seed(123)
trainRows=sample(rows,3000)
set.seed(123)
remainingRows=rows[-(trainRows)]
testRows=sample(remainingRows, 1000)
evalRows=rows[-c(trainRows,testRows)]
train = univ2[trainRows,]
test=univ2[testRows,]
eval=univ2[evalRows,]
dim(train); dim(test); dim(eval)
rm(age,ccavg, mortgage, inc, univ)
#### Building Models
#Decision Trees using C50
names(train)
#install.packages("C50")
library(C50)
dtC50 <- C5.0(loan ~ ., data = train, rules=TRUE)
summary(dtC50)
predict(dtC50, newdata=train, type="class")
a=table(train$loan, predict(dtC50,
newdata=train, type="class"))
rcTrain=(a[2,2])/(a[2,1]+a[2,2])*100
rcTrain
# Predicting on Testing Data
predict(dtC50, newdata=test, type="class")
a=table(test$loan, predict(dtC50,
newdata=test, type="class"))
rcTest=(a[2,2])/(a[2,1]+a[2,2])*100
rcTest
# Predicting on Evaluation Data
predict(dtC50, newdata=eval, type="class")
a=table(eval$loan, predict(dtC50,
newdata=eval, type="class"))
rcEval=(a[2,2])/(a[2,1]+a[2,2])*100
rcEval
cat("Recall in Training", rcTrain, '\n',
"Recall in Testing", rcTest, '\n',
"Recall in Evaluation", rcEval)
#Test by increasing the number of bins in inc and ccavg to 10
#Test by changing the bin to euqalwidth in inc and ccavg
library(ggplot2)
#using qplot
qplot(edu, inc, data=univ2, color=loan,
size=as.numeric(ccavg))+
theme_bw()+scale_size_area(max_size=9)+
xlab("Educational qualifications") +
ylab("Income") +
theme(axis.text.x=element_text(size=18),
axis.title.x = element_text(size =18,
colour = 'black'))+
theme(axis.text.y=element_text(size=18),
axis.title.y = element_text(size = 18,
colour = 'black',
angle = 90))
#using ggplot
ggplot(data=univ2,
aes(x=edu, y=inc, color=loan,
size=as.numeric(ccavg)))+
geom_point()+
scale_size_area(max_size=9)+
xlab("Educational qualifications") +
ylab("Income") +
theme_bw()+
theme(axis.text.x=element_text(size=18),
axis.title.x = element_text(size =18,
colour = 'black'))+
theme(axis.text.y=element_text(size=18),
axis.title.y = element_text(size = 18,
colour = 'black',
angle = 90))
rm(a,rcEval,rcTest,rcTrain)
#—————————————————
#Decision Trees using CART
#Load the rpart package
library(rpart)
#Use the rpart function to build a classification tree model
dtCart <- rpart(loan ~ ., data=train, method="class", cp = .001)
#Type churn.rp to retrieve the node detail of the
#classification tree
dtCart
#Use the printcp function to examine the complexity parameter
printcp(dtCart)
#use the plotcp function to plot the cost complexity parameters
plotcp(dtCart)
#plot function and the text function to plot the classification tree
plot(dtCart,main="Classification Tree for loan Class",
margin=.1, uniform=TRUE)
text(dtCart, use.n=T)
## steps to validate the prediction performance of a classification tree
————————————————————————
predict(dtCart, newdata=train, type="class")
a <- table(train$loan, predict(dtCart,
newdata=train, type="class"))
dtrain <- (a[2,2])/(a[2,1]+a[2,2])*100
a <-table(test$loan, predict(dtCart,
newdata=test, type="class"))
dtest <- (a[2,2])/(a[2,1]+a[2,2])*100
a <- table(eval$loan, predict(dtCart,
newdata=eval, type="class"))
deval <- (a[2,2])/(a[2,1]+a[2,2])*100
cat("Recall in Training", dtrain, '\n',
"Recall in Testing", dtest, '\n',
"Recall in Evaluation", deval)
#### Pruning a tree
——————–
#Finding the minimum cross-validation error of the
#classification tree model
min(dtCart$cptable[,"xerror"])
#Locate the record with the minimum cross-validation errors
which.min(dtCart$cptable[,"xerror"])
#Get the cost complexity parameter of the record with
#the minimum cross-validation errors
dtCart.cp <- dtCart$cptable[5,"CP"]
dtCart.cp
#Prune the tree by setting the cp parameter to the CP value
#of the record with minimum cross-validation errors:
prune.tree <- prune(dtCart, cp= dtCart.cp)
prune.tree
#Visualize the classification tree by using the plot and
#text function
plot(prune.tree, margin= 0.01)
text(prune.tree, all=FALSE , use.n=TRUE)
## steps to validate the prediction performance of a classification tree
————————————————————————
a <- table(train$loan, predict(prune.tree,
newdata=train, type="class"))
dtrain <- (a[2,2])/(a[2,1]+a[2,2])*100
a <-table(test$loan, predict(prune.tree,
newdata=test, type="class"))
dtest <- (a[2,2])/(a[2,1]+a[2,2])*100
a <- table(eval$loan, predict(prune.tree,
newdata=eval, type="class"))
deval <- (a[2,2])/(a[2,1]+a[2,2])*100
cat("Recall in Training", dtrain, '\n',
"Recall in Testing", dtest, '\n',
"Recall in Evaluation", deval)
#———————————————————
# Decision tree using Conditional Inference
library(party)
ctree.model= ctree(loan ~ ., data = train)
plot(ctree.model)
a=table(train$loan, predict(ctree.model, newdata=train))
djtrain <- (a[2,2])/(a[2,1]+a[2,2])*100
a=table(test$loan, predict(ctree.model, newdata=test))
djtest <- (a[2,2])/(a[2,1]+a[2,2])*100
a=table(eval$loan, predict(ctree.model, newdata=eval))
djeval <- (a[2,2])/(a[2,1]+a[2,2])*100
cat("Recall in Training", djtrain, '\n',
"Recall in Testing", djtest, '\n',
"Recall in Evaluation", djeval)
I cannot debug your code.
Hey Jason!
“Get your FREE Algorithms Mind Map”: Top of the page download for free link is leading to the page which does not exist.
Please help.
The link works for me.
You can sign-up to get the mind map here:
https://machinelearningmastery.leadpages.co/machine-learning-algorithms-mini-course/
At this link(www.saedsayad.com/decision_tree.htm), Saed wrote at the bottom of the page some issues about decision trees. So my question is,
1. What if we dealt with missing values in the dataset prior to fit the model to our dataset, how decision trees will work as Saed mention that decision trees only work with missing values?
2. What are continuous attributes as Saed allude that decision trees algorithm works with continuous attributes(binning)?
Please help regarding these questions……..
Indeed, missing values can be treated as another value to split on.
Continuous means real-valued.
If you have questions for Saed, perhaps ask him directly?
Can CART be used in SuperMarket??
What is supermarket?
Hello Jason,
I would like to know what actually the greedy approach and Gini index refers to??? What is the use of them
I show how to implement the gini score in this post:
https://machinelearningmastery.com/implement-decision-tree-algorithm-scratch-python/
Good morning Sir, I want to ask you about CART algorithm for predicting continuous number… I have read another reference and it tells that to predict continuous number, we should replace the gini index using standard deviation reduction. is it true??
thanks Sir
The gini index is for CART for classification, you will need to use a different metric for regression. Sorry I do not have an example.
Thanks for the response Sir. According to that, I want to ask your opinion about standard deviation reduction can be used for regression tree. If you don’t mind, I hope you can explain to me, Sir. Thanks Sir
Sorry, I don’t understand your question. Perhaps you can provide more context?
What is “standard deviation reduction” and how does it relate to regression trees?
I have read this article http://www.saedsayad.com/decision_tree_reg.htm
He used the Standard Deviation Reduction to replacing Information Gain. So, I still confuse to build the tree using such the formula. Maybe, you can help me, Sir.. 🙂
Thanks before
Sorry, I don’t know about that method, perhaps contact the author?
hello!sir
I want to know,CART can use in my system including three class labels .
CART can support 2 or more class labels.
What’s the difference between cart and id3?
I recall that ID3 came first and CART was an improvement.
I don’t recall the specific differences off hand, perhaps this will help:
https://en.wikipedia.org/wiki/ID3_algorithm
THE PREDICTOR VARIABLES IN CART ARE CORRELATED OR UNCORRELATED.
Typically uncorrelated is better, but it does not make as much difference with CART as it does with other algorithms.
Try with and without correlated inputs and compare performance.
Thanks professor, nice article, easy to understand…
Can you post about Fuzzy CART,
I am now decide this method for my case study…
Best thanks
Thanks for the suggestion.
Hello sir, I want to ask some question that I don’t understand. If my data set have three class label, can I use CART?
Sure.
In regression we are able to get an equation like this y=0.91+1.44X1+1.07X2 in the final, where we could replace x1 and x2 with any number of values, is it possible to obtain a similar formula at the ednd using CART ?
No, instead you would have a set of RULES extracted from the tree for a specific input.
Any one have a code of Bayesian Additive Regression Tree (BART) in R ?? I need it
Not off hand, sorry.
???? hello Sir Jason,
How the tree can be stored to file as a set of rules in python? Please
You could enumerate all paths through the tree from root to leaves as a list of rules, then save them to file.
I do not have an example of this though, sorry.
Can CART be used for Multi class classification without one versus all approach? What are the decision tree algorithms that support multi class classification? I understand that CHIAD trees can have more than 2 splits at each node. Does it mean it can handle multi class classification
Good question, I believe CART supports multi-class classification.
I recommend double checking with a good text book such as “the elements of statistical learning.
Hi, I am PhD Student, i have one course of Data Science. i have some confusion in CART. I want some clear examples links. i searched a lot. but not found proper article or examples that make my concept clear.
i need one clear solved example. could you please suggest some link.
Here is a clear example of CART in Python:
https://machinelearningmastery.com/implement-decision-tree-algorithm-scratch-python/
My question is: when i have a data set, and want to calculate Gini index or CART for that. so my understanding is to compute Gini for each instance of attribute individually . After that calculate the weighted sum of all indexes . Among that will further decide the root node…
Please help.
You can see an example of the calculation in python here:
https://machinelearningmastery.com/implement-decision-tree-algorithm-scratch-python/
Sir,
If I want to calculate ROC value from this code then is it possible?
Can you give some hint to do that
See this tutorial:
https://machinelearningmastery.com/roc-curves-and-precision-recall-curves-for-classification-in-python/
Hi Jason,
I can’t download the Algorithms Mind Map; I follow the steps, enter the correct @mail, but nothing.
Thanks in advance.
Contact me directly and I will email it to you:
https://machinelearningmastery.com/contact/
Mail sent. Thanks a lot.
Received and responded to. You’re welcome.
So in cart each feature is selected multiple times unlike id3 where each feature is only considered once rite ?
Yes, CART does not impose limits on how many time a variable appears in the tree – as far as I recall.
Hi am new to machine learning but would like to enhance evaluation of class performance using CART, is it possible?
For example what would be the input variables
Perhaps this will help you:
https://machinelearningmastery.com/how-to-define-your-machine-learning-problem/
Is CART tree always symetry? And will it makes advantage or disadvantage for CART?
No. The tree may be asymmetrical.
Is it good for CART?
Depends on the data.
Nice info sir, thanks.
Thanks.
I am new in Machine learning. I wish to confirm my understanding. For every node all features will be tested with all possible split point so as to minimize the cost function?. I mean before assigning any node a particular feature with a split point. Every feature will be tested with all possible split point and whosesoever will produce minimum cost function that will be picked up?
Please reply.
Yes, but only within the data collected/assigned to that point.